激光雷达数据 rviz2 化处理
激光雷达:LD19 型号;Python 版本:3.8.10;ROS2 版本:humble。
- 实现步骤:
- 👉 封装成 ROS2 的 LaserScan 消息
- 👉 发布成一个 ROS2 Topic
- 👉 用 rviz2 显示
一、现状分析
上一篇文档中的程序是这样的:
串口 → parse_data() → print()要改成:
串口 → parse_data()
→ 转换成 LaserScan 消息
→ 发布到 /scan
→ rviz2 显示当前状态:
✅ 串口雷达数据
✅ Python 解析
⬜ ROS2 LaserScan
⬜ rviz2 显示
⬜ slam_toolbox
⬜ 建图
二、需要了解 3 个 ROS2 关键概念
1️⃣ LaserScan 消息类型
ROS2 中雷达标准消息是:
bash
sensor_msgs/msg/LaserScan里面包含:
- angle_min
- angle_max
- angle_increment
- ranges[] (距离数组,单位:米)
- frame_id
rviz2 就是靠这个显示雷达点云的。
2️⃣ 你要写一个 ROS2 Node(Python)
基本结构:
python
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan3️⃣ rviz2 订阅 /scan 话题
只要你发布的是 LaserScan:
bash
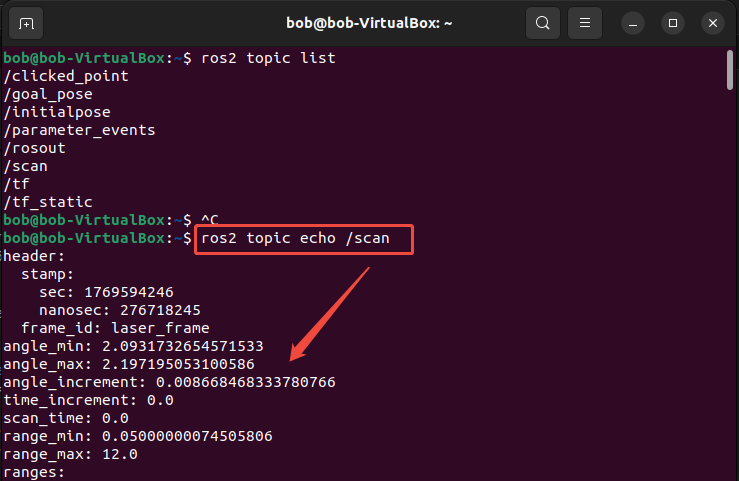
ros2 topic list看到:
/scanrviz2 添加:
LaserScan
Topic: /scan就能看到点云。
三、代码实现
python
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
import serial
import time
import math
class LidarNode(Node):
def __init__(self):
super().__init__('lidar_node')
self.publisher_ = self.create_publisher(LaserScan, '/scan', 10)
self.ser = serial.Serial(
port="/dev/ttyACM0",
baudrate=230400,
timeout=1
)
self.last_angle = 0
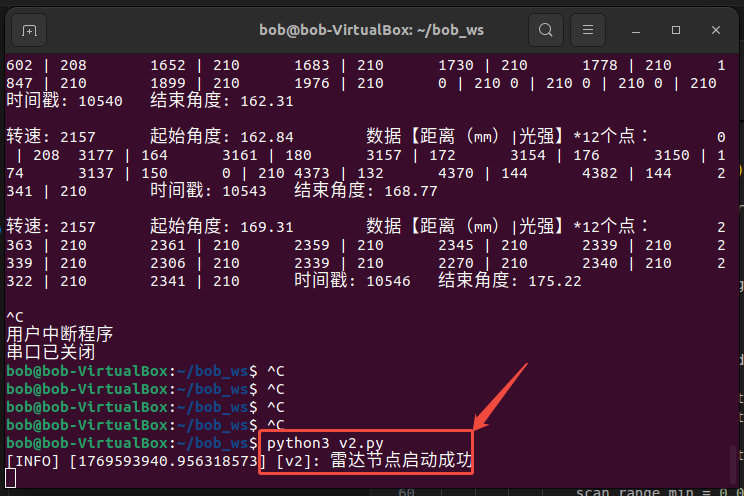
self.get_logger().info("雷达节点启动成功")
self.timer = self.create_timer(0.01, self.read_lidar)
def parse_data(self, data):
speed = data[1] * 256 + data[0]
start_angle = (data[3] * 256 + data[2]) / 100.0
points = []
for x in range(4, 40, 3):
distance = data[x+1] * 256 + data[x]
points.append(distance)
end_angle = (data[41] * 256 + data[40]) / 100.0
return start_angle, end_angle, points
def read_lidar(self):
data = self.ser.read(1)
if len(data) == 0:
return
if data[0] == 0x54:
data2 = self.ser.read(1)
if data2[0] == 0x2C:
data_rest = self.ser.read(45)
if len(data_rest) < 45:
return
start_angle, end_angle, distances = self.parse_data(data_rest)
scan = LaserScan()
scan.header.stamp = self.get_clock().now().to_msg()
scan.header.frame_id = "laser_frame"
scan.angle_min = math.radians(start_angle)
scan.angle_max = math.radians(end_angle)
scan.angle_increment = (scan.angle_max - scan.angle_min) / len(distances)
scan.range_min = 0.05
scan.range_max = 12.0
scan.ranges = [d / 1000.0 for d in distances] # mm -> m
self.publisher_.publish(scan)
def main(args=None):
rclpy.init(args=args)
node = LidarNode()
rclpy.spin(node)
node.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()四、运行步骤
1️⃣ source ROS2
bash
source /opt/ros/humble/setup.bash2️⃣ 运行你的节点
bash
python3 lidar_node.py你应该看到:
雷达节点启动成功截图代码运行命令为:
python3 v2.py,但是代码与前文保持一致。
3️⃣ 打开 rviz2
bash
rviz2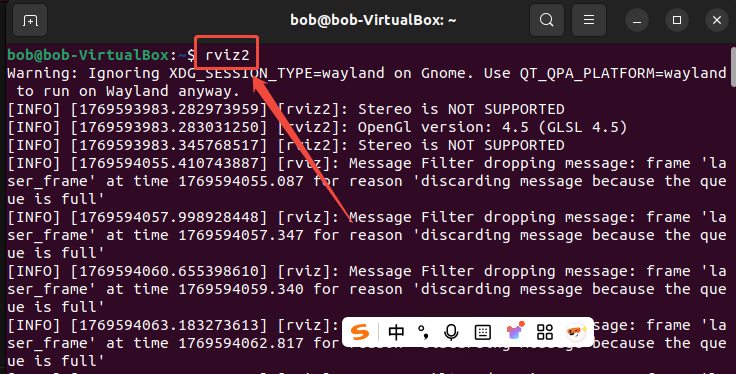
在 rviz2 中:
- Fixed Frame:
laser_frame - Add → LaserScan
- Topic:
/scan
如果一切正常,你会看到:
🎉🎉🎉 雷达点云在转!
设置 Fixed Frame:
laser_frame,同时 Add → LaserScan,并设置 Topic:/scan。

当前状态:
✅ 串口雷达数据
✅ Python 解析
✅ ROS2 LaserScan
✅ rviz2 显示
⬜ slam_toolbox
⬜ 建图
五、优化展示效果
目前看到的“点云”是一闪而过的,需要调整为持续显示。
- RViz → LaserScan:
- Decay Time = 10
- 保留最近 5~10 秒的点,而不是一帧就消失
- Size = 0.05
- 或者更大,否则点太小,看不清
- Fixed Frame = laser_frame
- Decay Time = 10

六、相关截图
相关验证命令,验证 scan 是否有效
>