使用 Python 获取激光雷达数据
激光雷达:LD19 型号;Python 版本:3.8.10;ROS2 版本:humble。
需要特别注意,一定要注意串口的权限,否则无法打开串口(以/dev/ttyACM0为例)。
bash
# 查看设备权限
ls -la /dev/ttyACM0
# 给串口设备所有用户读写权限
sudo chmod 666 /dev/ttyACM0一、上效果图
1.1 查看当前版本信息
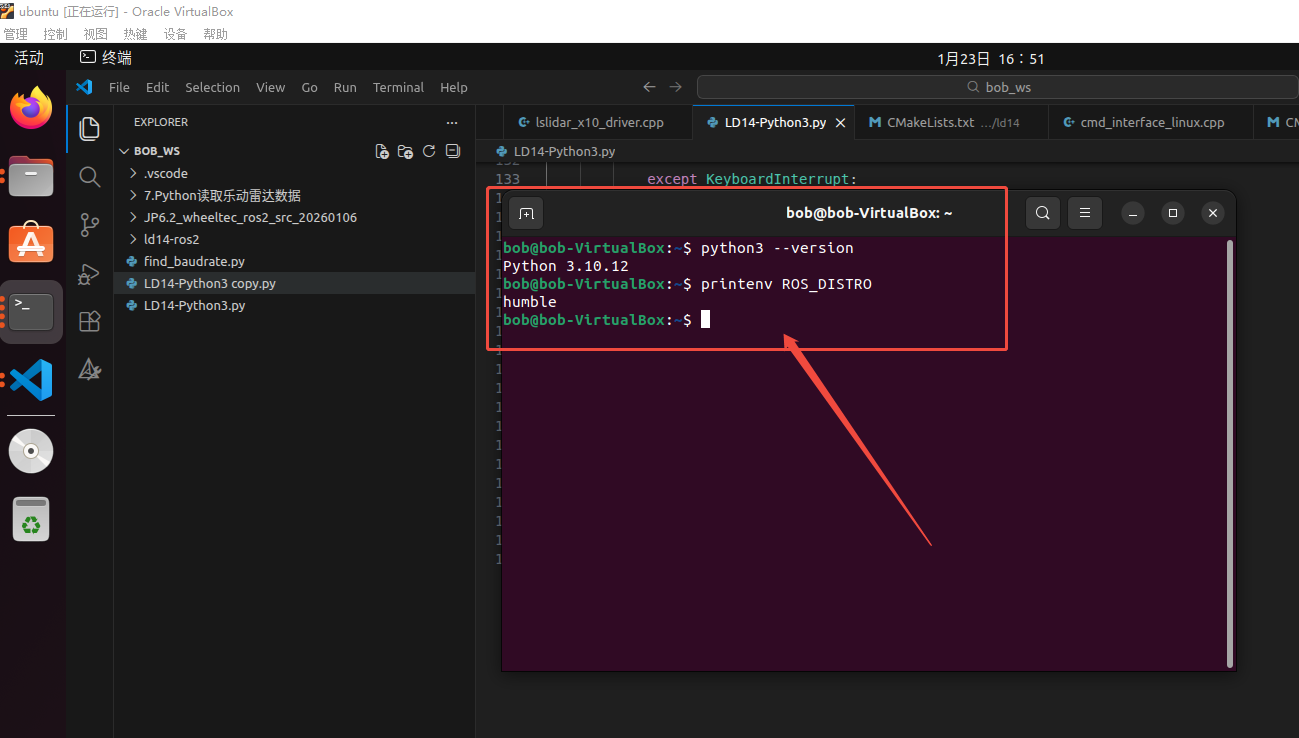
1.2 查看激光雷达连接是否 OK
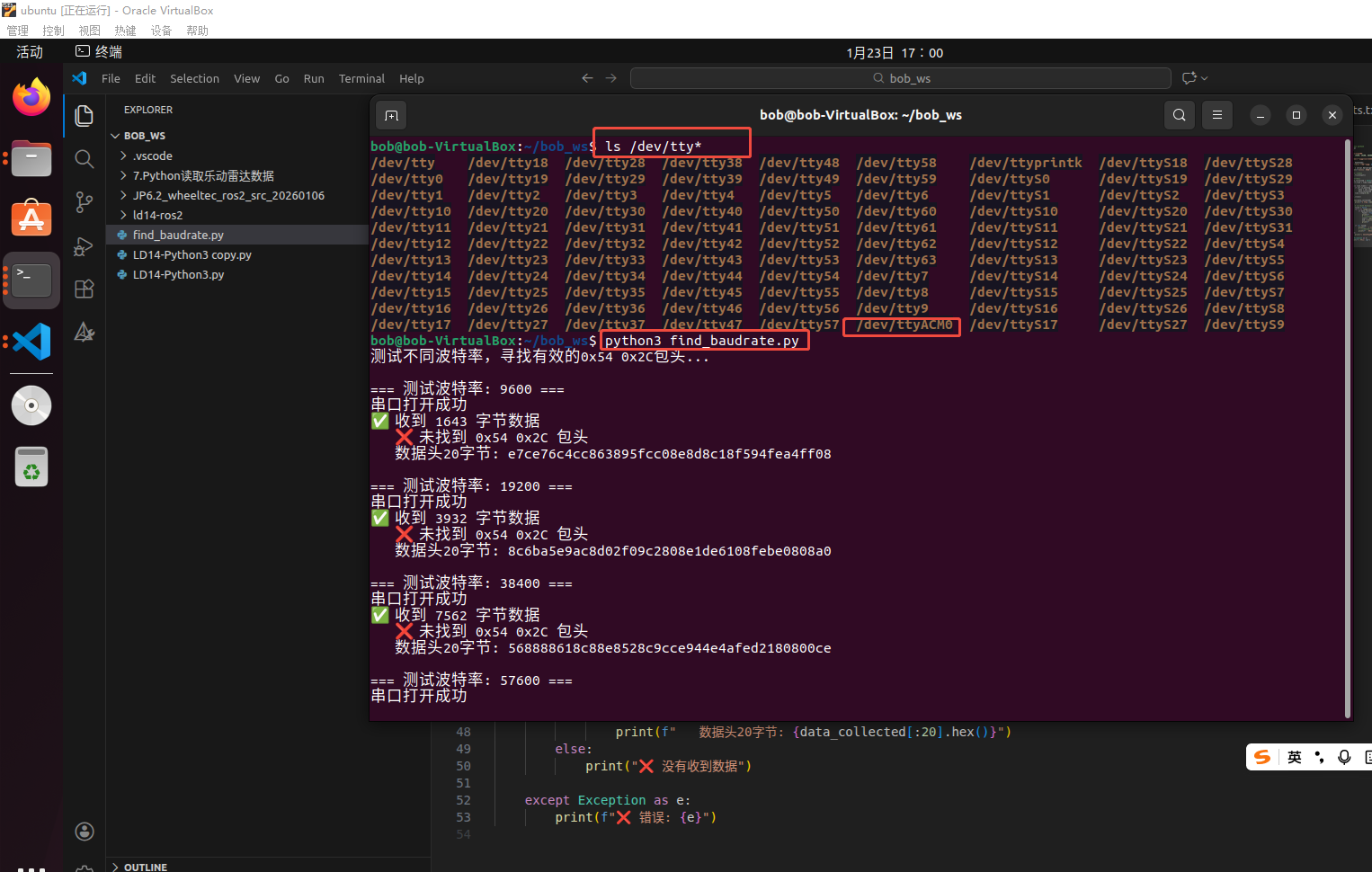
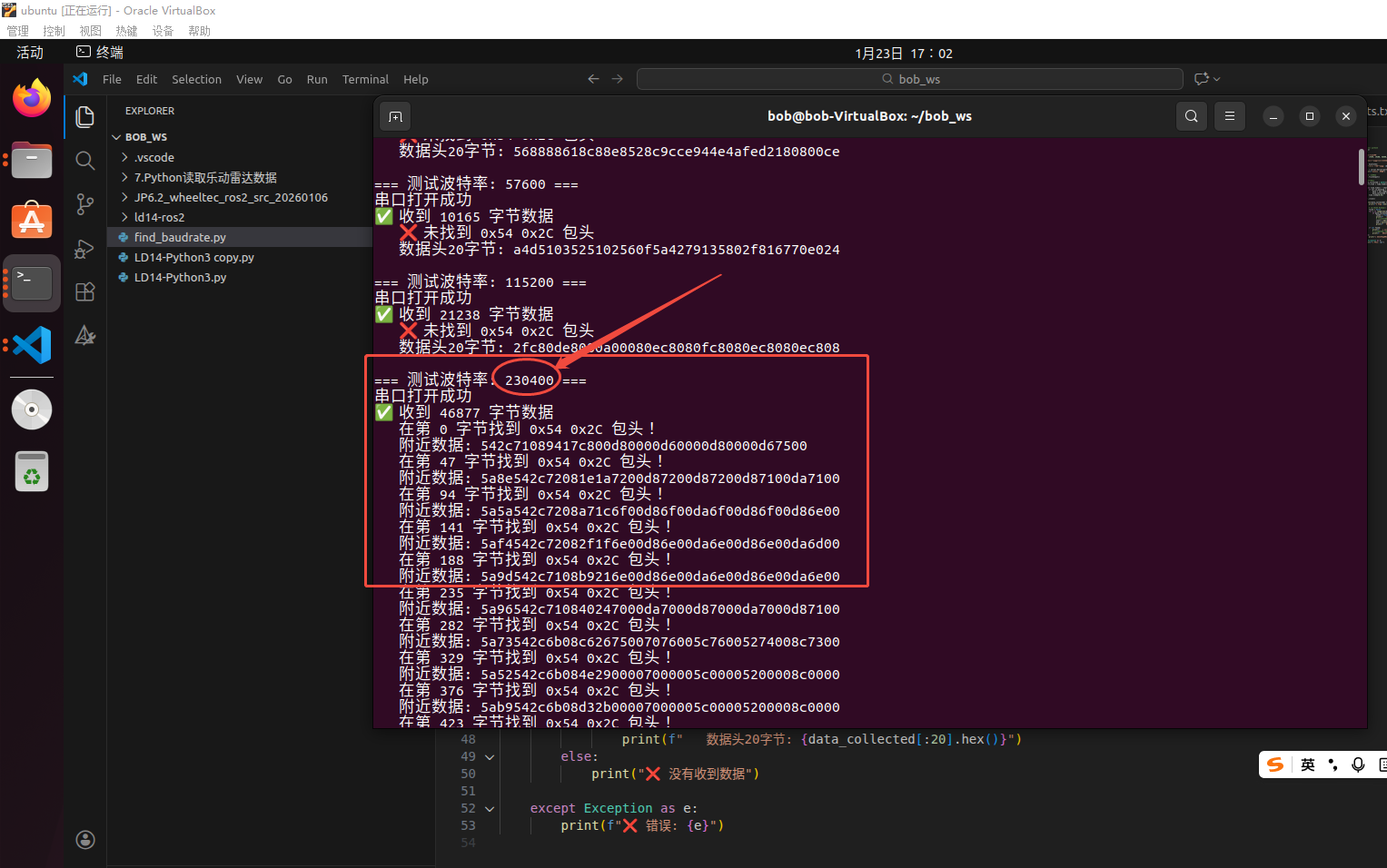
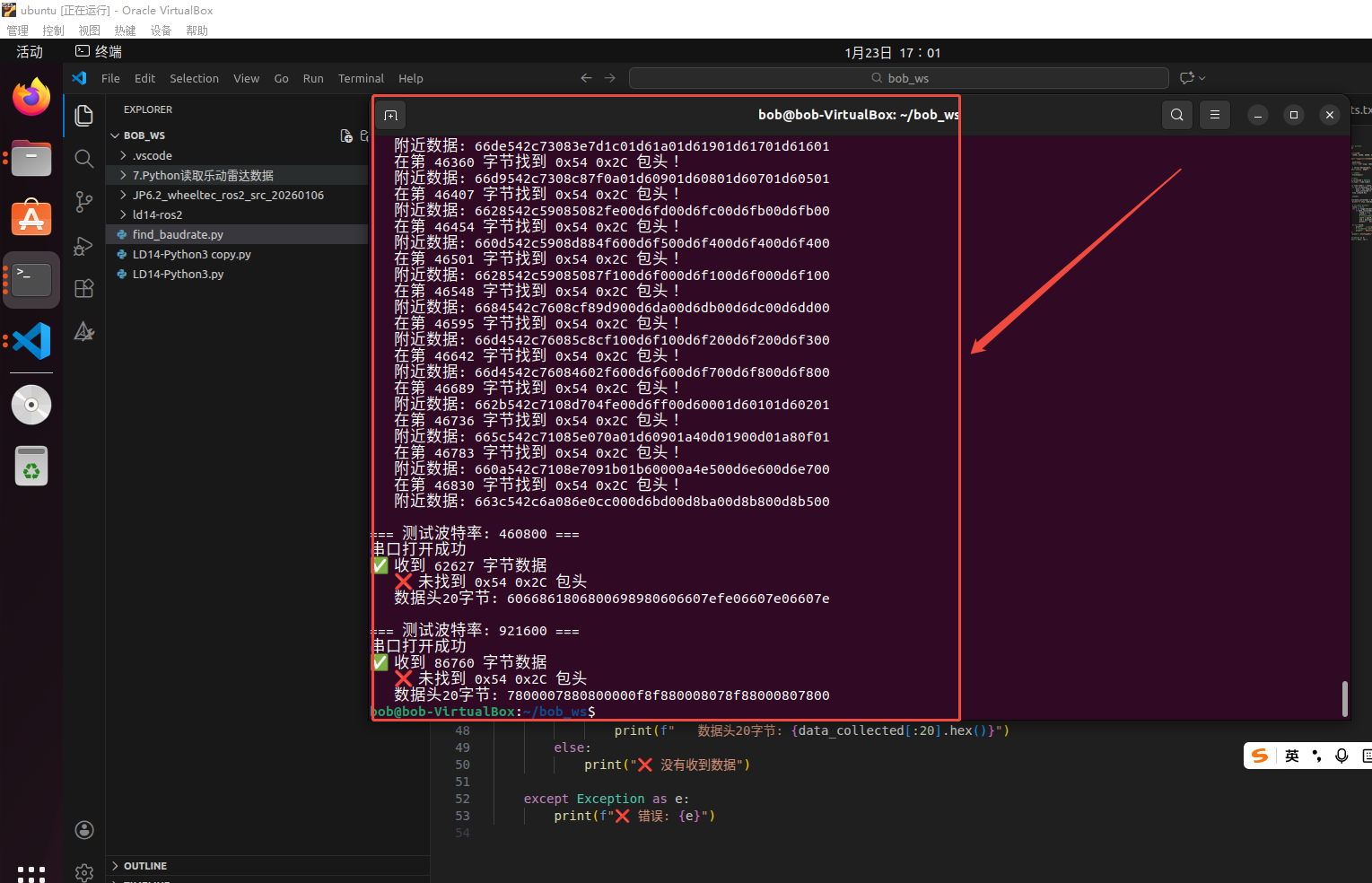
1.3 查看波特率
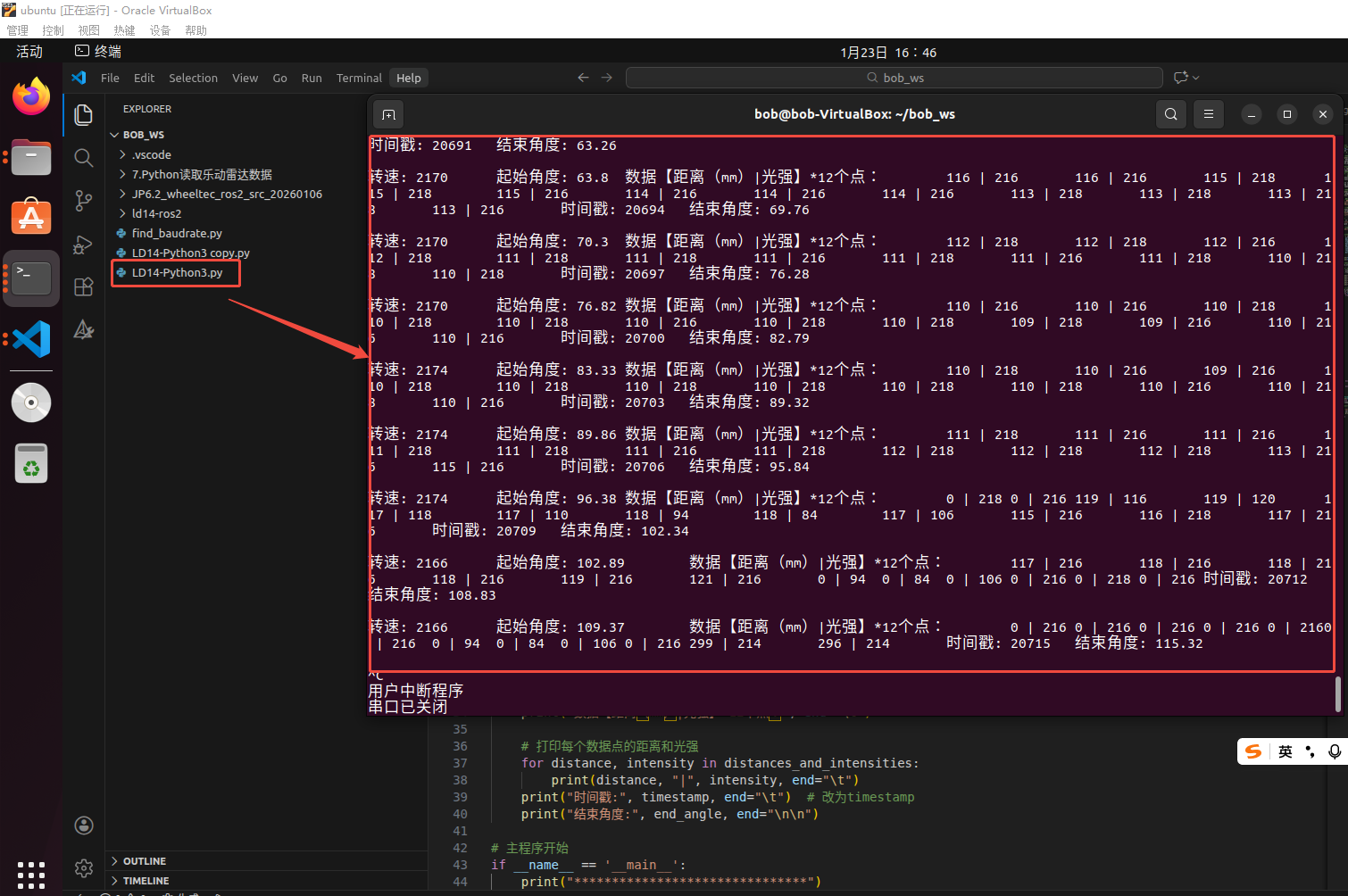
1.4 获取激光雷达数据
二、上代码
1. 获取波特率的脚本:find_baudrate.py
python
#!/usr/bin/env python3
import serial
import time
port = '/dev/ttyACM0'
baudrates = [9600, 19200, 38400, 57600, 115200, 230400, 460800, 921600]
print("测试不同波特率,寻找有效的0x54 0x2C包头...")
for baud in baudrates:
print(f"\n=== 测试波特率: {baud} ===")
try:
ser = serial.Serial(port, baud, timeout=1)
print(f"串口打开成功")
# 清空缓冲区
ser.flushInput()
# 收集数据
data_collected = bytes()
start_time = time.time()
while time.time() - start_time < 3: # 收集3秒数据
if ser.in_waiting > 0:
data = ser.read(ser.in_waiting)
data_collected += data
time.sleep(0.01)
ser.close()
if len(data_collected) > 0:
print(f"✅ 收到 {len(data_collected)} 字节数据")
# 查找0x54 0x2C模式
found = False
for i in range(len(data_collected)-1):
if data_collected[i] == 0x54 and data_collected[i+1] == 0x2C:
found = True
print(f" 在第 {i} 字节找到 0x54 0x2C 包头!")
# 显示包头附近的20字节
start = max(0, i-2)
end = min(len(data_collected), i+20)
print(f" 附近数据: {data_collected[start:end].hex()}")
if not found:
print(f" ❌ 未找到 0x54 0x2C 包头")
# 显示数据的前20字节
print(f" 数据头20字节: {data_collected[:20].hex()}")
else:
print("❌ 没有收到数据")
except Exception as e:
print(f"❌ 错误: {e}")2. 获取激光雷达数据的脚本:LD14-Python3.py
python
#!/usr/bin/env python
# -*- coding:UTF-8 -*-
from __future__ import print_function
import serial
import time # 确保这里导入了time模块
# 定义一个函数来解析数据包
def parse_data(data):
speed = data[1] * 256 + data[0] # 计算转速
start_angle = (data[3] * 256 + data[2]) / 100.0 # 计算起始角度
distances_and_intensities = [] # 初始化距离和光强列表
# 遍历数据包中的距离和光强数据
for x in range(4, 40, 3):
distance = data[x+1] * 256 + data[x] # 计算距离
#打印某个角度范围内的距离
# if start_angle<100 and start_angle>80:
# print(distance)
intensity = data[x + 2] # 获取光强
distances_and_intensities.append((distance, intensity)) # 添加到列表
end_angle = (data[41] * 256 + data[40]) / 100.0 # 计算结束角度
timestamp = data[43]*256+data[42] # 注意:这里不要用time作为变量名,会和time模块冲突
return speed, start_angle, distances_and_intensities, end_angle, timestamp # 改为timestamp
# 定义一个函数来打印数据包的内容
def print_data(speed, start_angle, distances_and_intensities, end_angle, last_angle, timestamp): # 这里也改为timestamp
if last_angle - start_angle > 100:
print("*******************************")
# 打印转速、起始角度和数据点
print("转速:", speed, end="\t")
print("起始角度:", start_angle, end="\t")
print("数据【距离(mm)|光强】*12个点:", end="\t")
# 打印每个数据点的距离和光强
for distance, intensity in distances_and_intensities:
print(distance, "|", intensity, end="\t")
print("时间戳:", timestamp, end="\t") # 改为timestamp
print("结束角度:", end_angle, end="\n\n")
# 主程序开始
if __name__ == '__main__':
print("*******************************")
last_angle = 0 # 初始化上一个角度
# LD19波特率:230400 LD14波特率:115200
print("正在打开串口 /dev/ttyACM0, 波特率 230400...")
try:
# 修改这里:添加更多参数确保连接稳定
ser = serial.Serial(
port="/dev/ttyACM0",
baudrate=230400,
timeout=5,
bytesize=serial.EIGHTBITS,
parity=serial.PARITY_NONE,
stopbits=serial.STOPBITS_ONE,
xonxoff=False,
rtscts=False,
dsrdtr=False
)
print(f"✅ 串口打开成功: {ser.name}")
print(f"✅ 串口设置: {ser.baudrate} bps")
# 等待串口稳定
time.sleep(0.5)
# 清空缓冲区
ser.flushInput()
ser.flushOutput()
print("开始监听雷达数据...")
print("如果长时间没有输出,请检查:")
print("1. 雷达是否上电(有指示灯亮)")
print("2. 雷达是否开始旋转(如果是机械雷达)")
print("3. 按 Ctrl+C 终止程序")
print("-" * 50)
# 循环读取数据
read_count = 0
error_count = 0
while True:
try:
# 添加超时和计数
read_count += 1
if read_count % 1000 == 0:
print(f"已尝试读取 {read_count} 次...")
# 读取第一个字节
data = ser.read(1)
if len(data) == 0:
# 每100次读不到数据时打印一次提示
if read_count % 100 == 0:
print(f"等待数据中... (尝试 {read_count} 次)")
continue
# 打印接收到的原始字节(调试用,开始时打开)
if read_count < 50: # 只在前50次读取时显示
print(f"[{read_count}] 收到字节: 0x{data.hex()}")
if data[0] == 0x54:
# 读取第二个字节
data2 = ser.read(1)
if len(data2) == 0:
continue
if read_count < 50: # 只在前50次读取时显示
print(f"[{read_count}] 第二个字节: 0x{data2.hex()}")
if data2[0] == 0x2C:
if read_count < 50:
print("✅ 找到数据包头 0x54 0x2C")
# 读取剩余45个字节
data_rest = ser.read(45)
if len(data_rest) < 45:
error_count += 1
if error_count % 10 == 0:
print(f"⚠️ 数据不完整,第{error_count}次,只收到 {len(data_rest)} 字节")
continue
# 解析和打印数据包
speed, start_angle, distances_and_intensities, end_angle, timestamp = parse_data(data_rest)
print_data(speed, start_angle, distances_and_intensities, end_angle, last_angle, timestamp)
last_angle = start_angle
error_count = 0 # 重置错误计数
except KeyboardInterrupt:
print("\n用户中断程序")
break
except Exception as e:
error_count += 1
if error_count % 10 == 0:
print(f"处理数据时出错({error_count}次): {e}")
continue
except Exception as e:
print(f"❌ 打开串口失败: {e}")
import traceback
traceback.print_exc()
# 确保串口被关闭
try:
if 'ser' in locals() and ser.is_open:
ser.close()
print("串口已关闭")
except:
pass