ROS2 workspace
安装 colcon
colcon 最常用的两个方法是构建(build)和测试(test)。构建方法用于构建工作空间中的所有包,而测试方法用于运行工作空间中的所有测试。
bash
sudo apt install python3-colcon-common-extensions
创建 workspace
bash
mkdir -p ~/ros2_ws/src
cd ~/ros2_ws
colcon build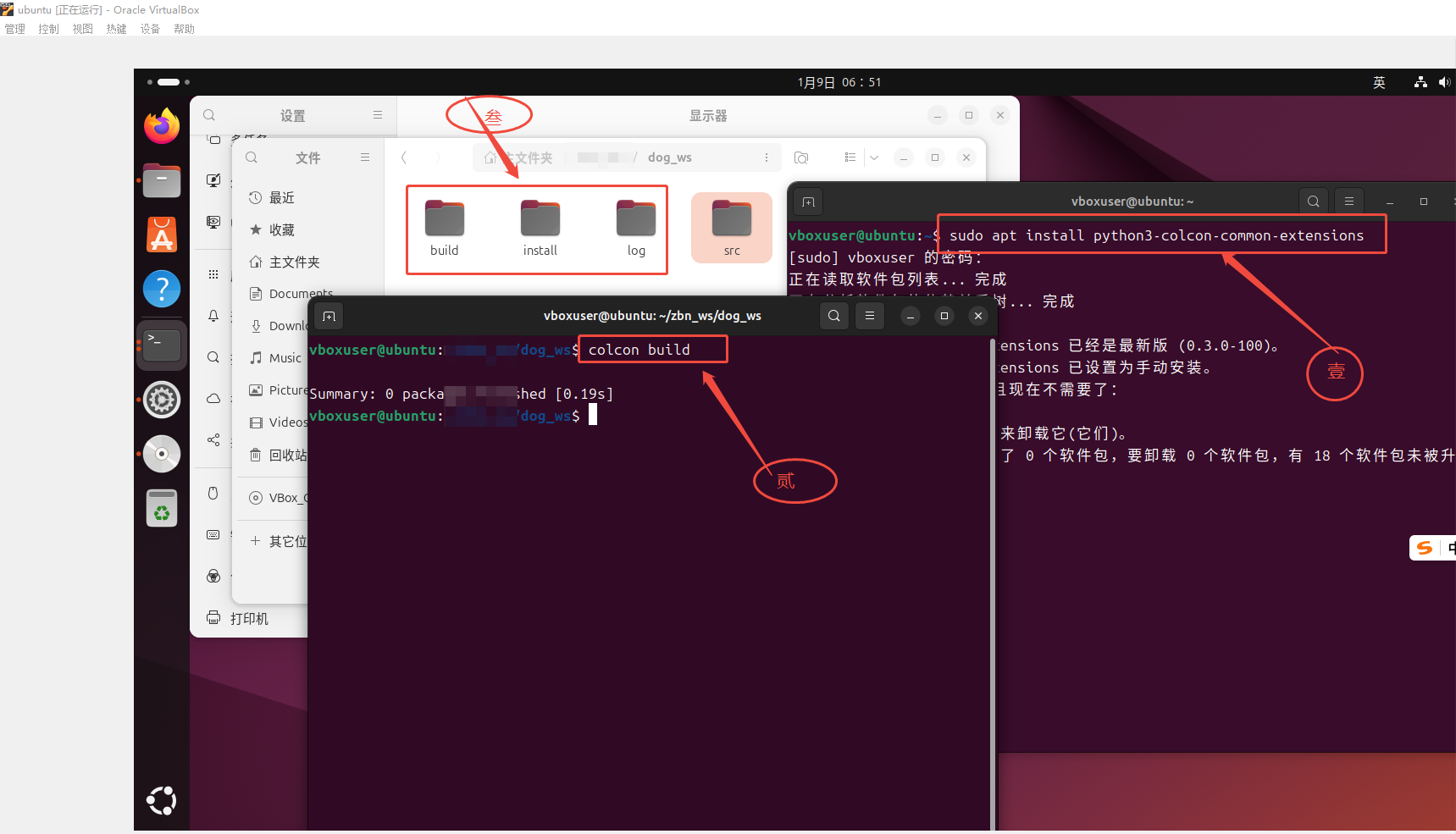
ROS2 项目的 bash 配置
类似于 ROS1 的 bash 配置,在~/.bashrc 中添加以下内容:
bash
source /opt/ros/foxy/setup.bash
source ~/ros2_ws/install/setup.bash参考截图如下: 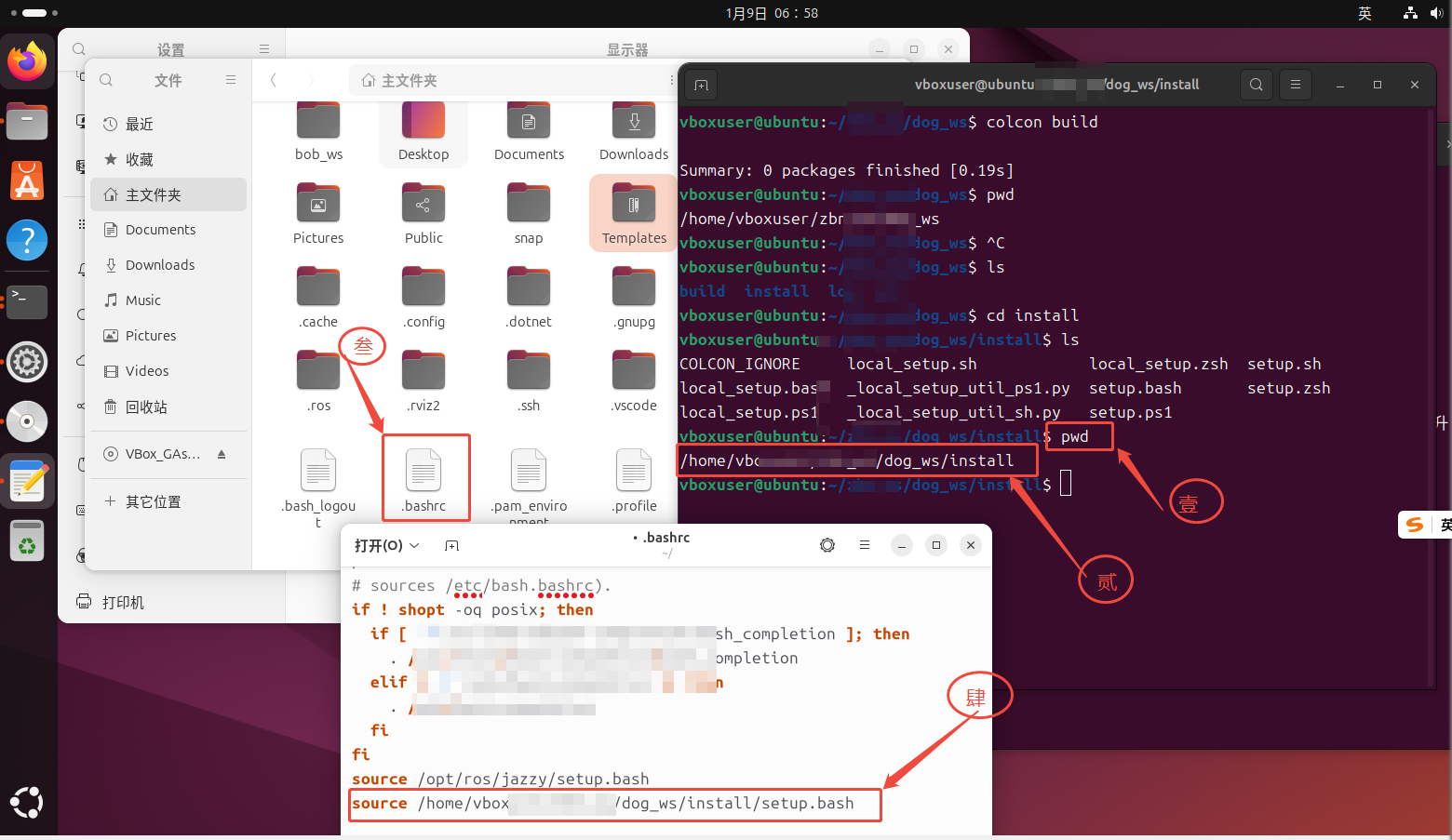
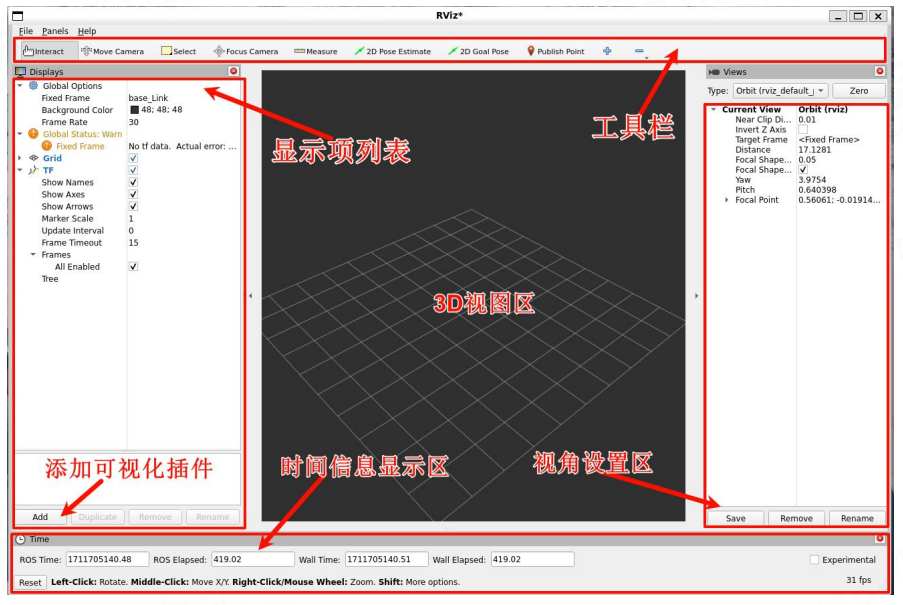
rviz2 工具
bash
rviz2参考截图如下: 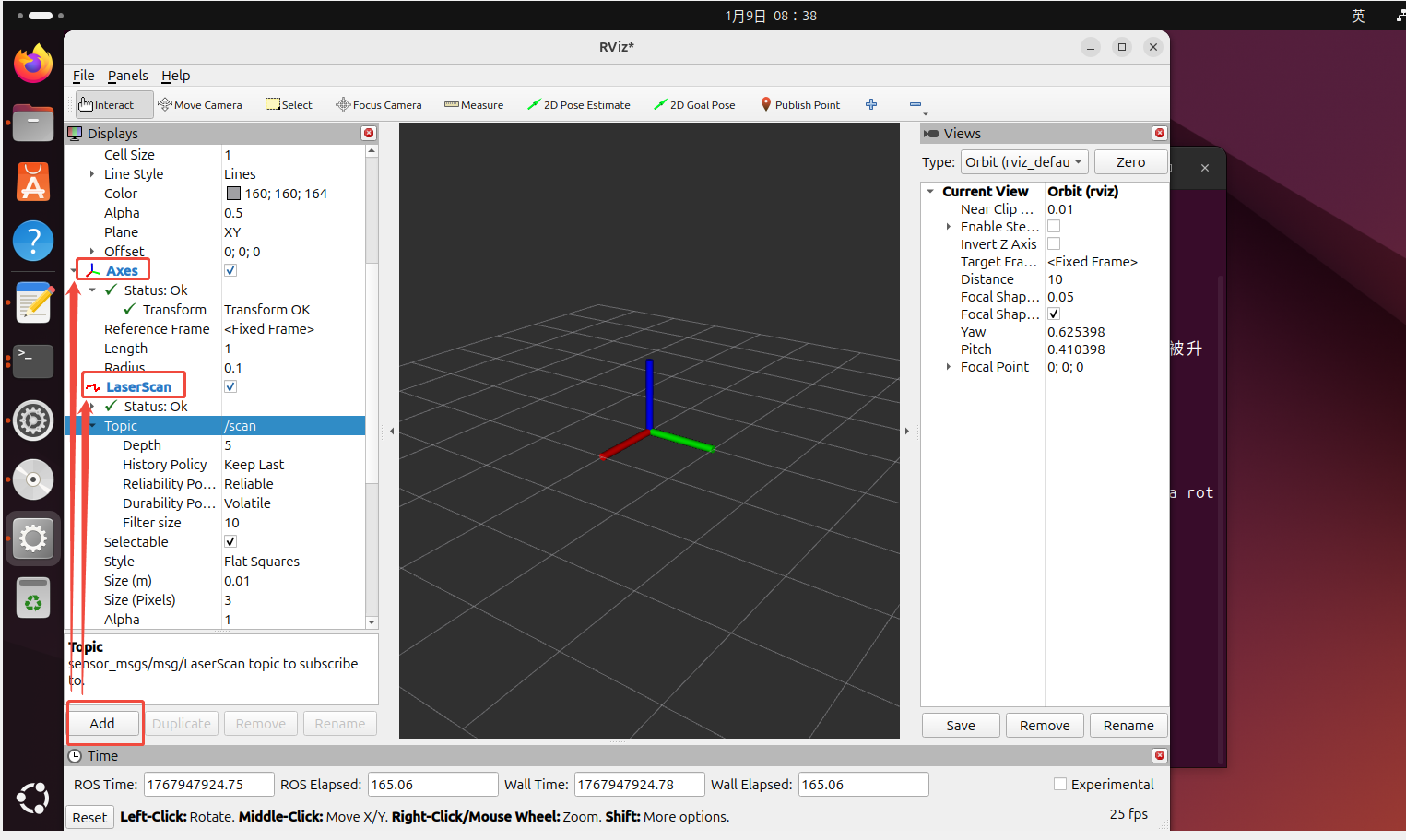
- build
- install
- log
- src
- ......
创建 package
bash
cd ~/ros2_ws/src
ros2 pkg create --build-type ament_cmake cpp_pkg --dependencies rclcpp std_msgs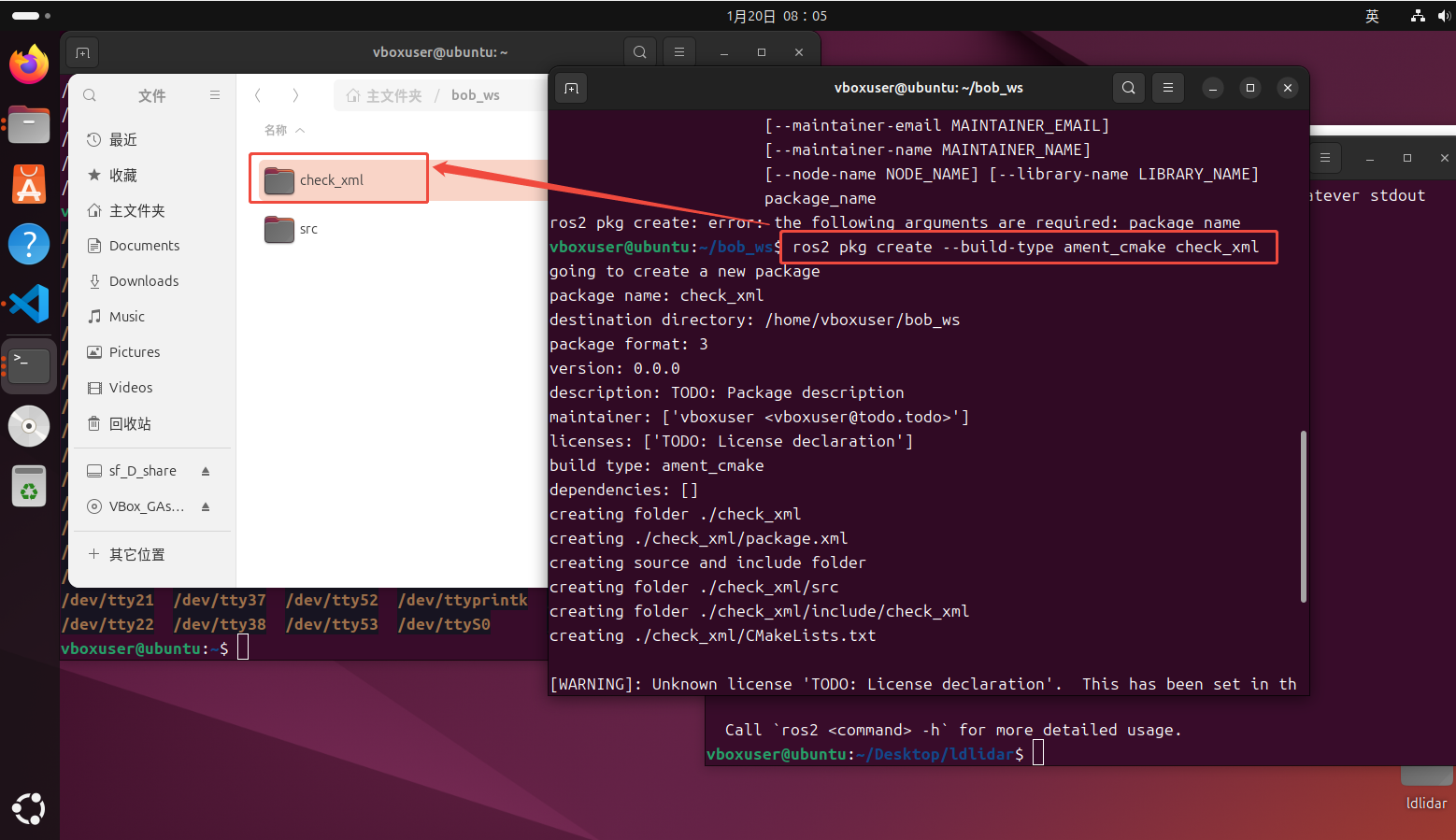
编写 package
bash
cd ~/ros2_ws/src/cpp_pkg
touch CMakeLists.txt
touch package.xml